Introduction
CommonRoad Global Planner
![]() Global Planning can greatly benefit motion planning for autonomous driving by guiding them with global information.
The CommonRoad Global Planner comprises the CommonRoad Route Planner (documentation) for
generating routes and smooth reference paths as well as the
CommonRoad Velocity Planner (documentation), which implements several algorithms for planning velocity profiles.
Global Planning can greatly benefit motion planning for autonomous driving by guiding them with global information.
The CommonRoad Global Planner comprises the CommonRoad Route Planner (documentation) for
generating routes and smooth reference paths as well as the
CommonRoad Velocity Planner (documentation), which implements several algorithms for planning velocity profiles.
Installation
pip install commonroad-global-planner
Paper
T. Mascetta, K. Northoff and M. Althoff: CommonRoad Global Planner: A Toolbox for Global Motion Planning on Roads. Intelligent Vehicles Symposium (IV), 2025.
Examples
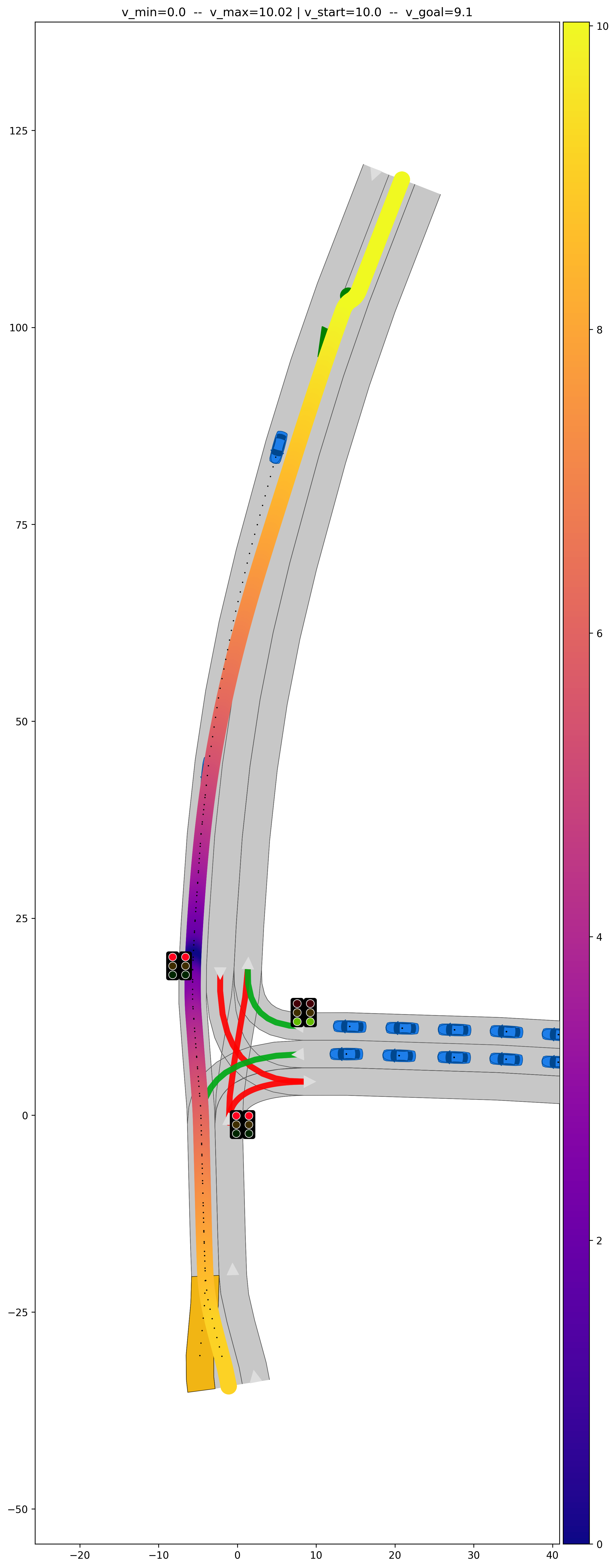
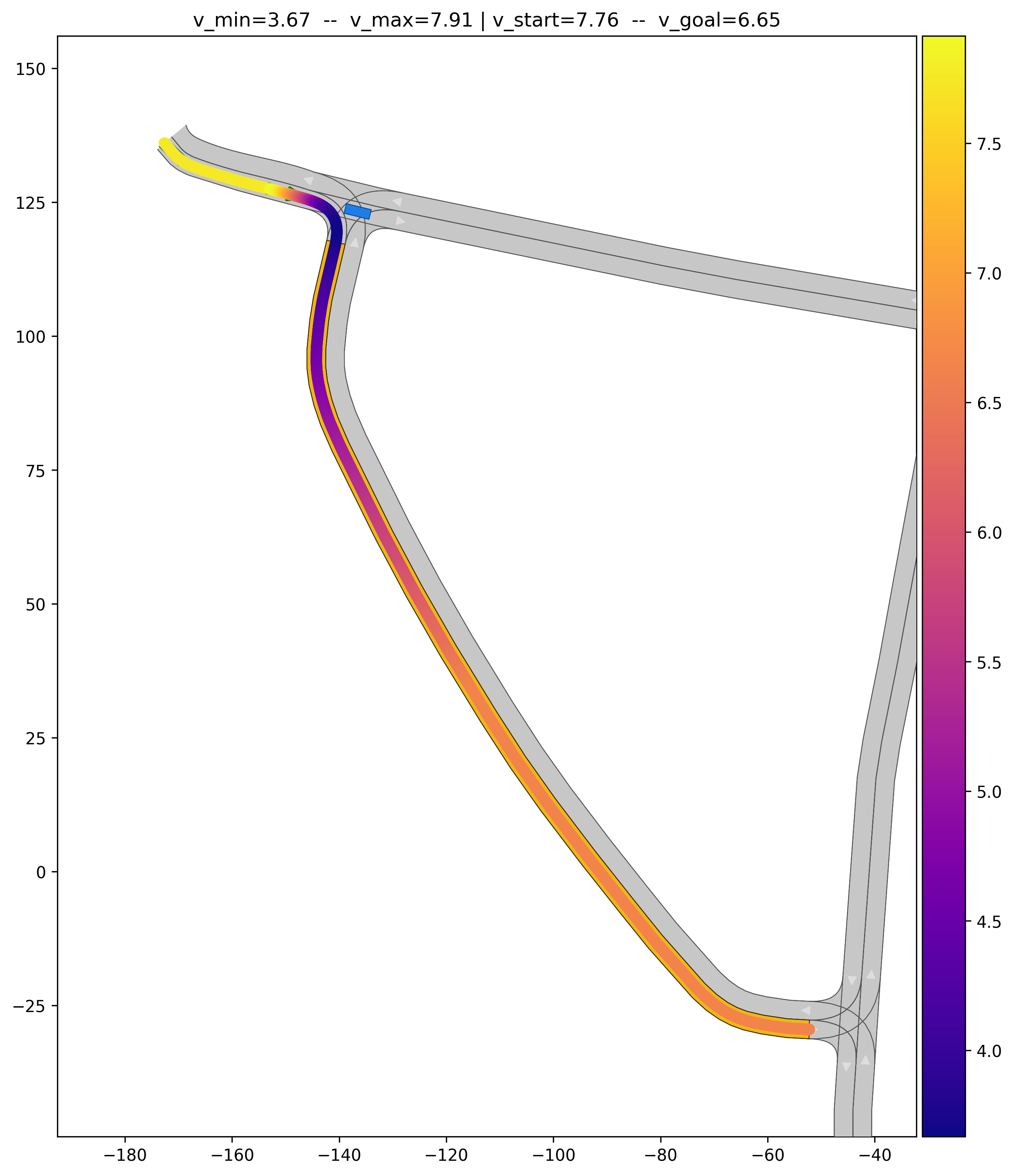
The CommonRoad Global Planner provides an algorithm each for routing, reference path generation and three algorithms for velocity profile generation. If desired, the velocity profile planning algorithms also consider traffic lights and stop lines, if provided in the map.
Default Planner
Fast Planner
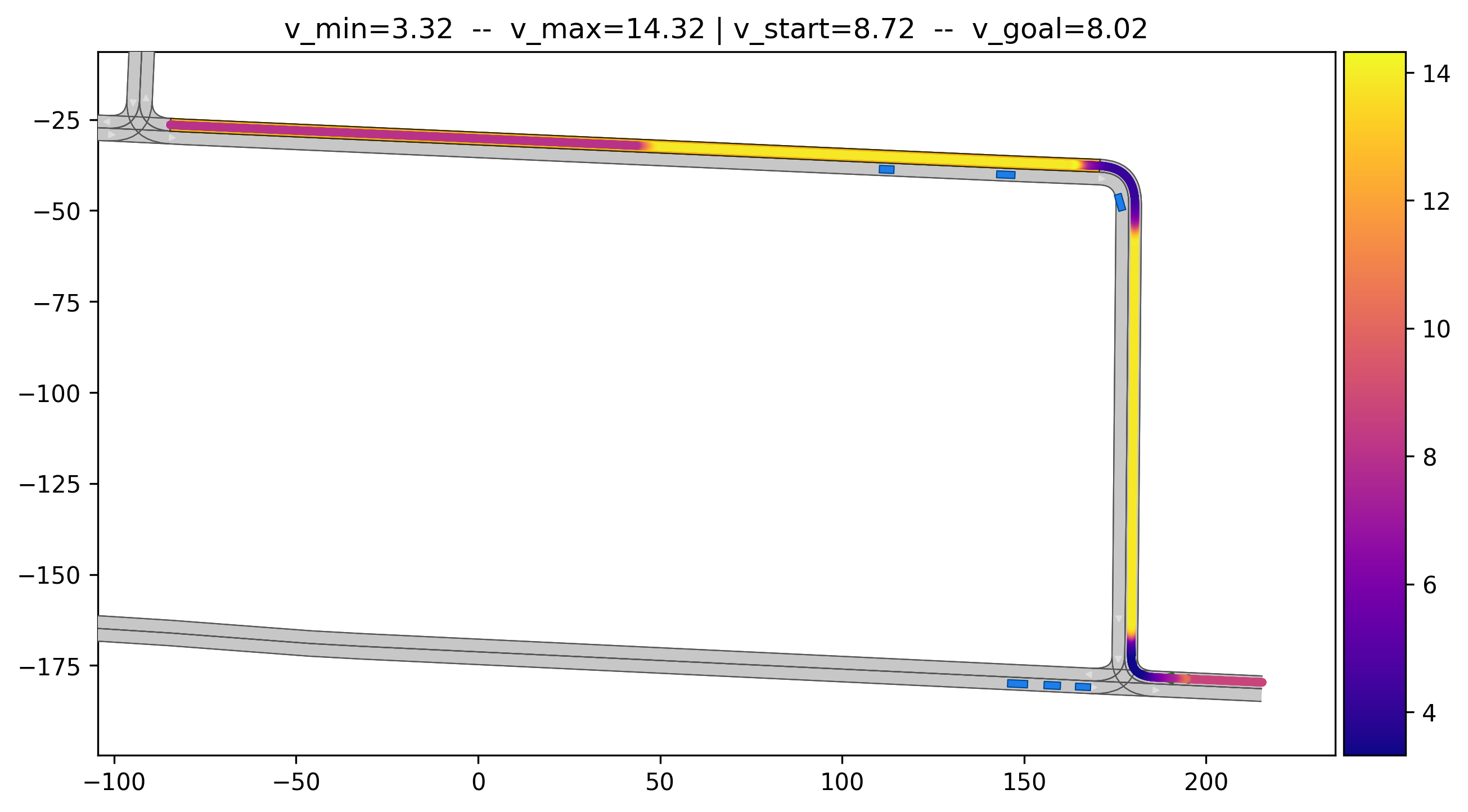
Traffic Lights